Need Help?
Ryukoku Extension Center
龍谷エクステンションセンター(REC)シーズダイジェスト

[プロフィール]
岡山大学大学院自然科学研究科博士後期課程修了。 住友重機械工業(株)、関西学院大学理工学部契約助手を経て、龍谷大学理工学部機械システム工学科助教に着任し、現在に至る。 バイオロボティクスに基づく人間支援ロボットの研究開発を行っている。
生物の「謎」にこそ、
革新的なロボット開発の糸口がある

私たちの研究テーマである「バイオロボティクスに基づく人間支援ロボットの開発」にある「バイオロボティクス」という言葉に耳馴染みのない方もいらっしゃると思います。「バイオニクス」と「ロボティクス」という2つの学問が結びついて「バイオロボティクス」という学問が誕生しました。人や生物の機能や構造を解明・解析し、そのメカニズムをロボット技術に応用するのがバイオロボティクスの概念です。
空気圧腱駆動ロボットハンドを
筋電義手へ対応させる
ロボットの開発には2つアプローチがあると思います。ひとつは問題を抱えている状態から解決する手段としてのロボット開発。もうひとつが先に記したように生命の謎を解明して得た知識をロボット開発に活かしていくというものです。この生物の謎を解明したことで得た知識が、問題解決を必要とする開発案件に活用されるケースもこれからは増えてくると思います。
私たちの研究によって開発された2つのロボットも、解明・解析の中から得た知識をロボット開発に応用していく中で、開発現場が抱える問題のブレイクスルーとなり、具体的な製品開発の足掛かりとなりました。
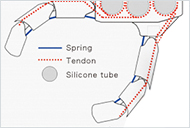
そのひとつが人工筋アクチュエータ※を用いた空気圧腱駆動ロボットハンドです。これはバルーンを人工筋とし、そのバルーンに指の屈伸運動を行わすための腱を結び付けます。その上で、指に沿って指先まで腱を這わせ、バルーンに空気を送り込むことで結びつけた腱が引っ張られ指が伸展し、空気を送り込むことをやめると指が屈曲した状態になります。
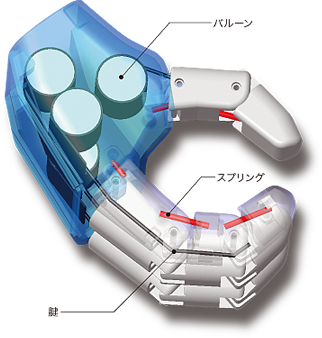
この腱駆動機構は人間の筋骨格の原理と全く同じであり、現在は筋電義手への応用を進めています。
筋電義手というのは、人間が筋肉を動かすときにその筋肉から発せられる微弱な電圧を利用して駆動させる義手のことを指します。
これにより力を込めた時にバルーンに空気が送り込まれ、ロボットハンドが作動することを可能としています。
※ アクチュエータ
ものを動かすための駆動装置である。身近なものとしては、モータ、空気圧シリンダなどがこれに当たる。
従来型のロボットハンドよりも
「人の手」に近づける
このロボットハンドですが、従来型のロボットハンドとは違う点をいくつか有しています。従来型のロボットハンドの駆動部分に用いられるモータは、金属部品なので重くなります。
もちろん駆動部分は数か所あるのでモータだけでも大変な重量です。工場などで使用される工業用のロボットハンドであればそれでも問題はないでしょうが、義手として使用するとなれば話は別です。
従来型の重量は、その多くが1kgを超えます。人間の手は300g以下の重さなので、従来型のロボットハンドを義手として使用すると、その重みで使う人が疲れてしまいます。今回、私たちが開発した人工筋アクチュエータを用いた空気圧腱駆動ロボットハンドの重量は290gと、人間の手の重量とほとんど差がありません。
また、アクチュエータや腱など使用しているパーツに金属製のものがほとんどなく、握った時の曲がり具合やしなり方など従来型に比べると随分と柔軟性を持たせることを可能としました。そして何よりモータなどの機械を使用していないので、事故などの危険性が低いということが従来型との大きな違いと言えます。
アメーバの移動原理が災害時の
レスキューロボットの開発に活かされる
もうひとつの研究成果として開発されたのが、アメーバの移動原理にヒントを得た、ウォームラック※駆動型円筒状クローラ※です。これは災害現場での活躍を目的として開発したロボットです。少し話は逸れますが、私たちは日頃より面白い動き、構造をしている生物を探し続けています。そんな中、アメーバの移動原理は非常に興味を覚えました。その構造がシンプルであるからこそ様々なシーンへの応用が可能ではないかと考え、開発に着手したのです。
※ ウォームラック
ウォームが円柱に対して、ねじのように螺旋状に連続的に歯が切られた歯車のことであり、ラックは歯を直線状に配置した歯車のことを指す。車輪状ではないため純粋な意味では歯車ではないが歯車に分類され、「直線歯車」ともいう。このウォームとラックを噛合わせることで、(ウォームの)回転力を(ラックの)直線の動きに変換する伝達機構のことをウォームラックという。
※ クローラ
戦車やブルドーザ等によく使われている走行装置。この装置を開発した会社の名前からキャタピラとも呼ばれ、下部走行装置にベルト(クローラベルト)を使用した構造を有する。

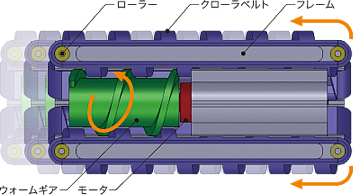
アメーバの移動原理は細胞質の中にある流動性物質が後ろから前に向かって流れを発生させることにより、流れの前方へとアメーバ自身が移動していくのです。この移動原理を再現するためロボットを円筒状とし、内部にモータとウォームギアというらせん状のギアを設置し、ギアとモータの周りをクローラベルトで取り囲みました。モータの動力でウォームギアが回転し、ギアとクローラベルトの歯がかみ合うことでクローラベルト自体が動き、前進することが可能となります。
様々な分野の学問から得る知識が
新たな研究の創造へとつながる
従来型のクローラ式レスキューロボットは、その大きさや形状上、倒壊した家屋の下やパイプの中を走行することが困難でした。また段差などにより横転した場合、元へ戻ることが難しく、戻ることを可能にするためにはそのための機能を加味しなければなりませんでした。しかし私たちが開発したウォームラック駆動型円筒状クローラは、がれきの下のような狭い空間内に侵入可能でありさらには溝やパイプの中に入ってしまう、あるいはがれきなどで左右を挟まれたりしても、ロボット全体がクローラベルトで覆われているためそのまま進行することが可能です。現在はレスキュー用ロボットしての活用を検討していますが、将来的には大腸内視鏡用ロボットとしてなど医療分野での活用も充分考えられます。
このようにロボット工学の領域だけではなく、生物学、医学、さらには社会学など様々な分野の知識を得なければ新たな研究が進まないのが、近年の潮流だと言えます。
今後、私たちも他の分野の研究者と積極的に交流を行い、新たな研究のきっかけを創出していくことに注力していきたいと思います。

私たちが研究の柱にしているのが「人間支援ロボット」の開発です。
従いまして、医療など、人への支援が必要な現場では、何が求められているのかを伺わなければ研究は進みません。私自身が以前、企業に在籍し商品開発に携わっていたこともあり、これまで「ニーズに基づく課題発見・問題解決」という視点でも研究開発に取り組んできました。
産業界の人たちからお話を伺いながら、研究と実用化の溝を埋めることを考えていきたいと思います。「こんなことが相談できるのか?」と考えるよりも、一度お話を伺わせていただければ、問題解決の糸口をつかむことができるかもしれません。是非ご相談いただければと思います。