Need Help?
Ryukoku Extension Center
龍谷エクステンションセンター(REC)シーズダイジェスト
[プロフィール]
岡山大学自然科学科博士後期課程産業創成工学専攻修了
2012年 龍谷大学理工学部機械システム工学科助教
2015年 龍谷大学理工学部機械システム工学科講師
2013年 ネイチャー・インダストリー・アワード日刊工業新聞社賞受賞
2013年 公益財団法人 油空圧機器技術振興財団 学術論文顕彰受賞

生物特有の優れた機能や構造を模倣し、工学的に応用する技術をバイオミメティクスと呼びます。ロボット分野でも今あらためて注目が集まっており、従来のアプローチの限界を突破する手段として期待されています。
従来のロボットは、メカニズムを複雑にしたり、複雑なコンピュータ制御により、高性能化がなされてきましたが、当研究室では、生物にヒントを得て「従来よりも極めてシンプルな仕組みで、かつ従来ではできなかったことができる新しいロボットメカニズム」の研究に取り組んでいます。
アメーバの移動原理にヒントを得た
コンパクトで走行性に優れた
管路走行型クローラロボット
凹凸のある地面など悪路での走行性に優れたクローラ型移動機構(クローラとは商標でいうキャタピラ)は、農業機械や建設機械のほか、配管内や災害現場など人間が立ち入ることが困難な空間で、探索や情報収集などを行うロボットとして応用されています。
一般に、クローラ型移動機構で管路を走行させるには、複数の駆動用モータを搭載するほか、段差通過時に段差を判別するためのセンサや、径の大きさが異なる管内を走行する時に機体の大きさを変えるための機構、および管内上昇時に機体を保持するためのアクチュエータや機構・制御が別途必要になり、その結果、大きくて複雑なシステムとなってしまいます。
そのような中で、当研究室ではモータ一つとシンプルな機構のみで構成される、新しいクローラ型移動機構を開発しました。
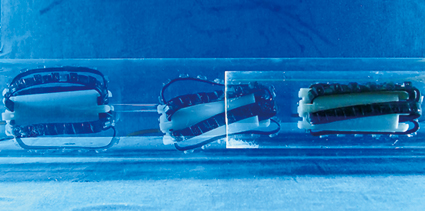
ヒントになったのはアメーバの細胞質流動に基づく推進原理で、単一のモータとウォームギアで、複数の湾曲型クローラベルトを動かして推進するものです。管の内壁を柔軟なベルトでかき分けながら走行し、センサやコンピュータ制御を必要とすることなく、管の径が変わっても、管内を上昇するときも、曲がった管内でも、スムーズに走行することが可能です。このようにシンプルな構造でかつ多様な走行ができるため小型化も可能。今のところ想定される用途としては、水道管やガス管などの点検・清掃用ロボットのほか、レスキューロボットや大腸内視鏡装置、医療用カテーテルなど、多岐に渡って応用できると考えられます。
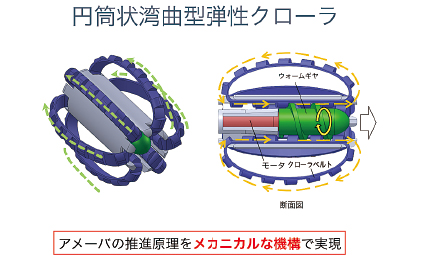
円筒状湾曲型弾性クローラ
アメーバの動きにヒントを得たクローラ型ロボット。径の大きさが異なる管から管への移動もスムーズに行える。
動植物の優れた構造や運動機能に
着目し、新たな機構を開発
受動跳躍機構
機構のみで構成される受動跳躍ロボット。センサやアクチュエータを使用せずに、位置エネルギーのみで連続跳躍を行う。
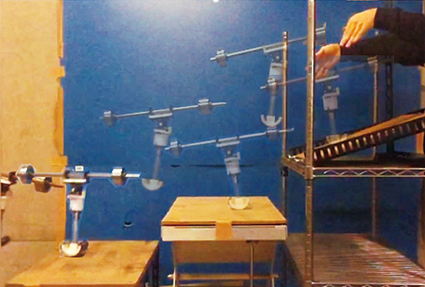
跳躍ロボットは、着地した時に縮んだバネの弾性を次の跳躍に活かしてエネルギーを再利用できるのが特徴です。従来の跳躍ロボットでは、モータなどによって跳躍力を得て跳躍し、また、跳躍中はコンピュータ制御とアクチュエータによって足を振って姿勢をコントロールすることで前方へ連続跳躍します。一方で、当研究室ではそのような連続跳躍を機構のみでできる、「受動跳躍ロボット」の研究をしています。このロボットは、重力のみを利用して連続跳躍をすることができ、跳躍中の足振りや姿勢のコントロールも、モータなどを使わずにバネの力だけでおこなうことができます。
きっかけとなったのはカンガルーの跳躍で、カンガルーは移動する速度を上げてもエネルギーの消費量が変わらないということに興味を持って、これを解明するための一つのアプローチとしてこの研究がスタートしました。最終目標としてカンガルーのように、少ないエネルギーで長い距離を移動できる機構を目指しています。
円柱状のものを登るための移動機構の研究として、つる植物を規範とした巻きつき推進メカニズムの研究に取り組んでいます。
柱や木を昇降するロボットはすでに他でも研究されていますが、昆虫のように爪などをひっかけて登ったり、車輪で登っていくもので、途中に障害物があったり柱の太さが変化すると、走行困難になります。一方つる植物は、細くて柔らかい構造を木に巻き付けることによって、障害物があっても柱の太さが変わっても容易に上昇できます。
まず、研究の第一段階として、巻きつく対象に接触していない外側をつねに伸張させて螺旋状に巻きついていく、つる植物特有の接触屈性に着目し、空気圧を利用して柱に柔軟に巻き付くデバイスを開発しました。今後はこのデバイスを上昇させる機能について研究を進めていくことになります。
また、昨年から始めた研究「ヒトの寝返り動作を規範とした索状移動機構の研究」は、人間が横になって転がる寝返り動作をロボットに応用するもので、細かな砂地や軟弱地面、不整地でも移動でき、さらに階段を登ったり、狭いところに入り込んだりすることもできる、新しい移動機構の可能性を探るというスタンスで研究を進めています。イメージとしては索状(縄状)のシンプルな構造です。転がる時の人の関節や重心の動きなどをもとに寝返り動作のメカニズムを解明し、ロボットに応用することができれば、これまでにない新しい移動機構が実現できると考えています。
寝返り動作を規範とした索状移動体

砂地での寝返りの様子
提案する索状移動体のイメージ図
シンプルで画期的なロボットメカニズム
の新たな用途の広がりに期待
学生時代は、筋電義手といった人を支援するロボットの研究をしていました。本学に来てからも当初は人間支援系ロボットの研究がメインでしたが、いろいろなロボットを作っていくうちに、生物特有の機能や構造をヒントにして開発したロボットは、シンプルな構造でありながら、それまでできなかったことが簡単にできてしまうことに気付き、そこに魅力を感じるようになりました。
そういった視点から、人間支援系ロボットについても、健常な手指の動きを検出して、麻痺した手指をコンピュータ制御によって同じように動かすという従来のものではなく、機構だけで、健常な手と同じ動作を麻痺した手に同時に行わせる「パッシブ型手指リハビリテーション装置」を開発しました。製造コストがかからないうえ、持ち運びできていつでも簡単にリハビリができるというメリットがあります。
上記のようなリハビリロボットの研究もしていますが、現在の研究の多くは、現状のニーズにあまり固執せずに、とにかく新しいロボットメカニズムを創り出しロボットの可能性を広げていく、シーズ指向型研究に軸足を置いています。この研究の積み重ねがロボットの基盤技術の形成・底上げに貢献し、さらにそこからこれまで想像もできなかった新しい用途やイノベーションが生まれるはずという確信のもと日々研究に励んでいます。
研究者からのメッセージ
企業の課題点が思わぬ研究の糸口になる可能性も
シンプルな構造でありながら、より高い機能を発揮するロボットメカニズムの研究が当研究室の研究テーマです。どちらかと言うとすぐに実用化・製品化しようとするのではなく、基礎的な研究が中心ですが、逆に、企業から「こういうことができなくて困っている」といった課題点をいただき、それを糸口に研究を始めるアプローチにも興味があります。
解決すべき課題がある時には、ぜひ気軽に相談に来ていただきたいと思います。問題解決の糸口を見つけたり、最適なメカニズムを開発するためのサポートができるかもしれません。企業や社会からの声を聞きながら、一緒に研究を進めていく姿勢も大切にしたいと思っています。